Virtual CAN for AGL
AGL and WSL VCAN connectivity
Here is the architecture overview for virtual CAN connectivity between AGL and WSL

Enable VCAN in WSL
WSL by defualt doesn't have VCAN enable, the job now is get the WSL kernel source code (same version we have), enable VCAN from configuration and generate a new WSL Kernel version with VCAN support for our Project, Next are the commands you need follow to complete this activity
Get actual WSL Kernel version
$ uname -r
Output:
- $ uname -r 5.15.90.1-microsoft-standard-WSL2
Create a new folder inside your home folder(example \home\user\WSLkernel) and execute below command
$ git clone https://github.com/microsoft/WSL2-Linux-Kernel
$ cd WSL2-Linux-Kernel
Now we need use same WSL kernel version you get previously
$ git checkout `WSL-version`
Example: $ git checkout linux-msft-wsl-5.15.90.1
Is time to start with the configuration, then create a config backup of your configuration
$ cat /proc/config.gz | gunzip > .config
Run below commands
$ make prepare modules_prepare
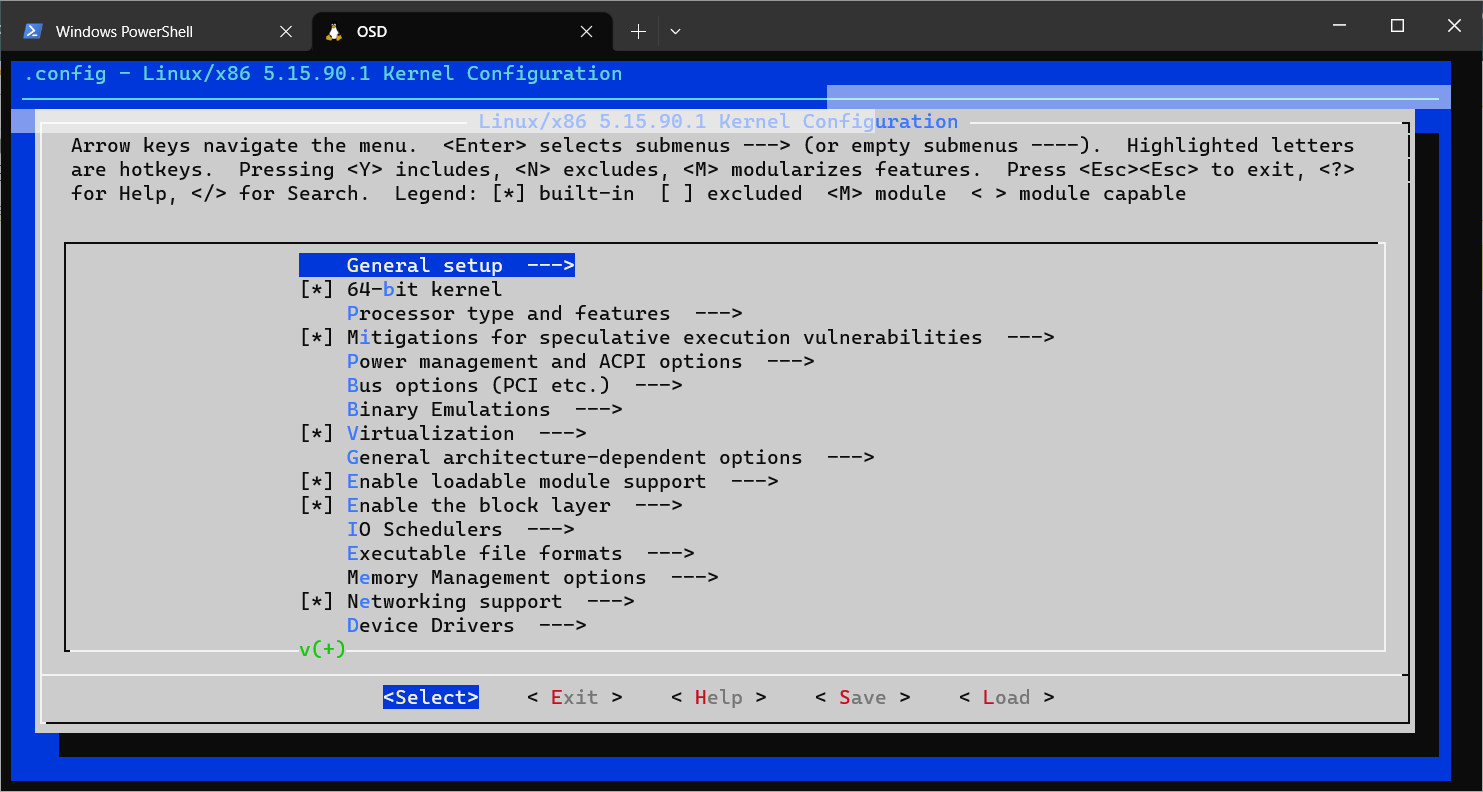
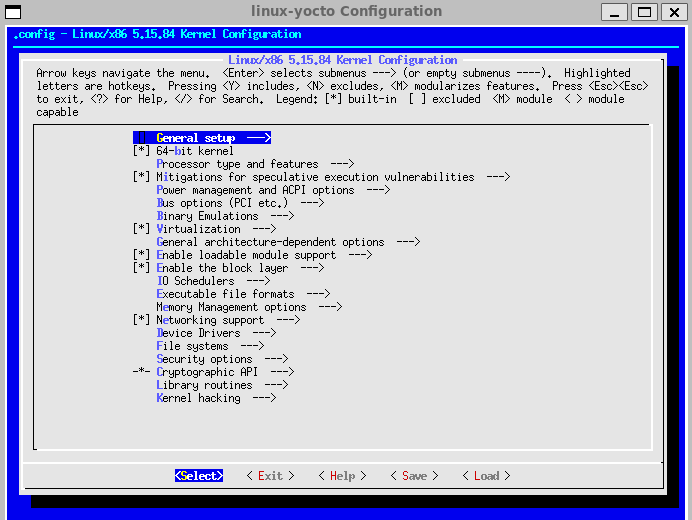
$ make menuconfig
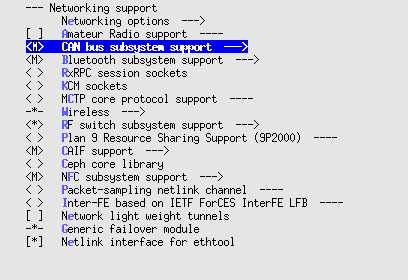
The second command will open Linux Kernel Menu where you will need navigate and enable vcan
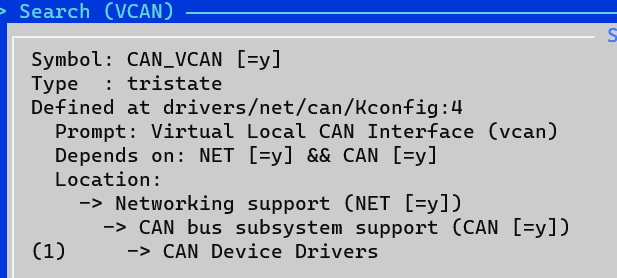
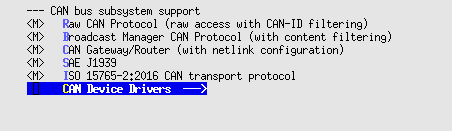
VCAN path and their dependency from Kernel configuration
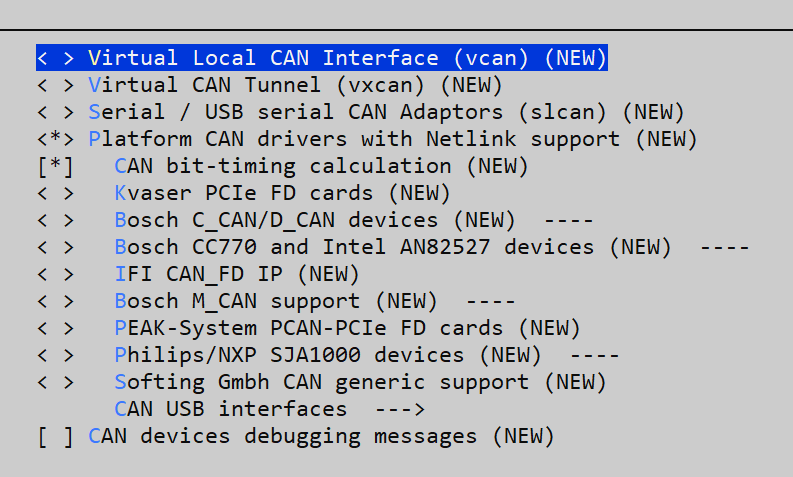
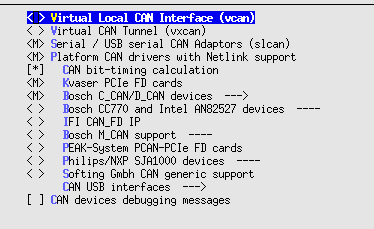
VCAN Configuration
 Once you complete the configuration change, save your changes before exit
Once you complete the configuration change, save your changes before exit
Note: Is possible also change the configuration without Kernel menu, this is possible editing /proc/config file but you need know what are you are doing there
Now is time to build the new kernel with the new configration
$ make modules
Once previous command complete successfully, need install the new set of modules
# make modules_install
To ensure the new modules are available please take a look in /lib/modules folder, inside you should see a new file like below
$ls /lib/modules
5.15.90.1-microsoft-standard-WSL2+
Copy the new kernel to Windows folder we will need to boot WSL with this kernel
cp vmlinux /mnt/c/Users/"myuser"/WSLKernel
Is time to stop WSL and change the configuration to boot WSL from new Kernel
wsl --shutdown
Also we need update the .wslconfig from C:\Users"myuser", open the file and add the below line just replace the path from the kernel file you copy from WSL
#Use own kernel with socketCAN enable
kernel=C:\\Users\\"myuser"\\WSLKernel\\vmlinux2
Open WSL and once boot is complete check the actual version
$ uname -r
Output will be like:
- $ uname -r 5.15.90.1-microsoft-standard-WSL2+
Run below commands to enable module component in your WSL
$ sudo modprobe vcan
Now create a virtual CAN network interface using this command
$ sudo ip link add dev can0 type vcan
Install CAN Tools in WSL
Can-utils is a command line Linux utility that contains basic tools which can display, record, generate and replay CAN traffic. Along with these basic operations we can also calculate busload, convert log files and it also contain ISO 15765-2:2016 tools.
Install CAN Tools for test purpose with next command:
sudo apt install can-utils
CANdevStudio
CANdevStudio aims to be cost-effective replacement for CAN simulation software. It can work with variety of CAN hardware interfaces (e.g. Microchip, Vector, PEAK-Systems) or even without it (vcan and cannelloni) . CANdevStudio enables to simulate CAN signals such as ignition status, doors status or reverse gear by every automotive developer
Download the latest release (deb format) from https://github.com/GENIVI/CANdevStudio/releases, below is an example
wget https://github.com/GENIVI/CANdevStudio/releases/download/v1.2.2/CANdevStudio-1.2.2-Linux-standalone.deb
Once you have the deb file Install with next commands
sudo apt install /path/of/installation/file/CANdevStudio-1.2.2-Linux-standalone.deb
Once installation is completed lunch CANdevStudio run CANdevStudio.sh script
/usr/CANdevStudio/CANdevStudio.sh > /dev/null 2>&1 &
Will come first CANdevStudio Windows like this
Here you have to create a new project
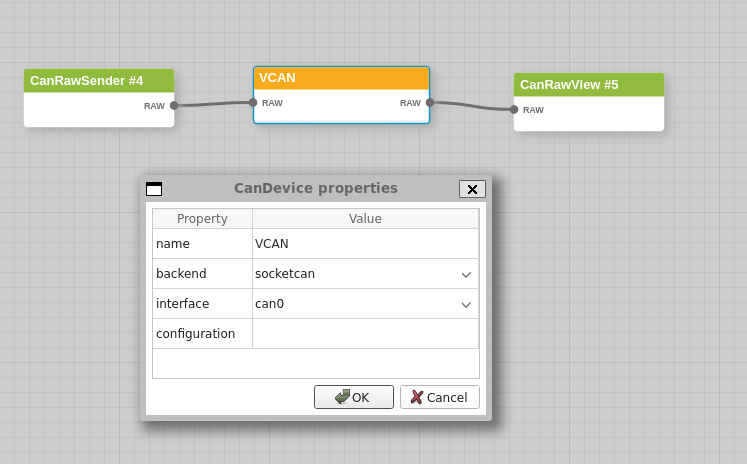
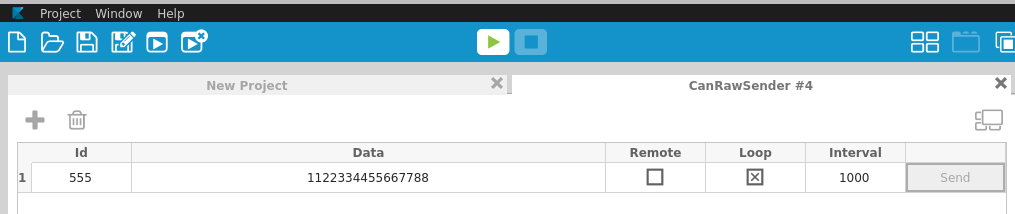
Add CAN load with CanRawSender block
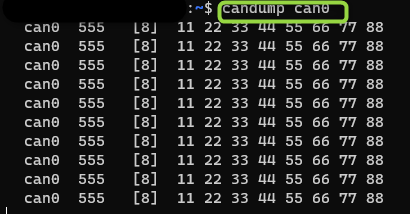
Check CAN log using candump tool (part of can-utils installed in previous section)
AGL kernel Configuration for CAN connectivity
This section will provide the steps to config the AGL kernel to add CAN bus with specific device in order to connect with HOST machine (WSL). Guess require CAN configuration like in real usage
As previous kernel configuration we need open kernel menu
$ bitbake linux-yocto -c menuconfig
Now add Network Support for CAN, CAN Subsystem support, bitrate calculation support and kvaser_pci device for new Kernel
Save new configuration and build your Demo Project
Enable VCAN in QEMU
An example of CAN connection between host with AGL (guess) is available in this page (CAN Bus Emulation): CAN Bus Emulation
Base on previous information we add the QEMU configuration for can0 and kvaser_pci device, below is the output command
/Folder/Path/of/your/BuildFolder/tmp/work/x86_64-linux/qemu-helper-native/1.0-r1/recipe-sysroot-native/usr/bin/qemu-system-x86_64 \
-device virtio-net-pci,netdev=net0,mac=52:54:00:12:35:02 \
-netdev user,id=net0,hostfwd=tcp::2222-:22,hostfwd=tcp::2323-:23,tftp=/AGL/UniversityNF/BUniversityClusterDemo/tmp/deploy/images/qemux86-64 -object rng-random,filename=/dev/urandom,id=rng0 \
-device virtio-rng-pci,rng=rng0 \
-drive file=/AGL/UniversityNF/BUniversityClusterDemo/tmp/deploy/images/qemux86-64/agl-cluster-university-qemux86-64-20230912224834.rootfs.ext4,if=virtio,format=raw -vga vmware \
-display default,show-cursor=on -usb \
-device usb-tablet -device virtio-rng-pci -vga virtio -vnc :0 \
-machine q35 -cpu qemu64,+ssse3,+sse4.1,+sse4.2,+popcnt -smp 4 \
-m 2048 \
-serial mon:stdio -serial null \
-kernel /AGL/UniversityNF/BUniversityClusterDemo/tmp/deploy/images/qemux86-64/bzImage \
-append 'root=/dev/vda rw ip=dhcp console=ttyS0 console=ttyS1 oprofile.timer=1 tsc=reliable no_timer_check rcupdate.rcu_expedited=1 console=ttyS0,115200n8 quiet ' \
-object can-bus,id=canbus0 \
-object can-host-socketcan,id=canhost0,if=can0,canbus=canbus0 \
-device kvaser_pci,canbus=canbus0
Demo
Run Host and AGL with CAN configuration described before.
Open CANdevStudio on Host and prepare a project to transmit different messages
Prepare AGL to test CAN network
ip link set can0 type can bitrate 1000000
ip link set can0 up
Open candump tool for can0 you should see the messages sent by CANdevStudio from WSL(HOST) in AGL